HUNTER 2.0




HUNTER 2.0
The Ackermann Front Steering Drive-by-wire Chassis. The best-in-class development platform to explore cutting-edge applications of low-speed autonomous driving applications.
|
40 km |
10 km/h |
150 kg |
10 Degrees |
|
Max Travel |
Max Speed |
Payload Capacity |
Climbing Capacity |
Customized Chassis Solution
The HUNTER 2.0 battery pack is lithium iron phosphate-based, offering flexible configuration to meet your task-based capacity needs. Customized speed planning up to 10km/h is available to meet the needs in various autonomous driving scenarios and support a wide set of use cases for industrial-grade robotics.
- Portable battery packs are provided with two capacity options for easy switch.
- Battery management system (BMS) ensures safety during operation.
- Speed planning up to 10km/h is supported.
Brand-new Power System
HUNTER 2.0 continues the simple and elegant look of the HUNTER series with all-steel body, 400w dual servo motor drive, independent front wheel steering and robust, precisely controlled power system to support smooth running, whether indoors or outdoors.
- Advantageous car-like structure and low tire wear are suitable for high-endurance scenarios.
- Independent front-wheel steering and rocker suspension make it possible to pass over speed bumps with ease.
- 400w dual servo motor with payload up to 150KG.
Safe and Reliable Power-off Parking
HUNTER 2.0' s slope parking feature allows a reliable standstill on a slope, thanks to the well-designed drive train. In the event of power outage or failure of the vehicle while traversing sloped terrains, wheels will be locked in place without slipping off to ensure stable and reliable safety performance.
Multiple-load expansion, rapid secondary development
HUNTER can be customized for a variety of advanced operation modes (remote driving/automatic driving). Users can communicate with the main control through CAN bus protocol. Hunter also provides open-source SDK and ROS_PACKAGE, and its structural scheme is currently adapt¬ed to the most automatic driving schemes.
- Slide rails are reserved for quick building top load (sensing, industrial control, IMU, routing, camera, etc.)
- Supports customized design of sensor Al profile bracket
- Supports access of more advanced automatic driving system (such as ROS, Apollo, etc.)
SPECIFICATIONS
| Model |
HUNTER 2.0 |
Suspension Form |
Front Wheel Independent Suspension |
| Dimensions |
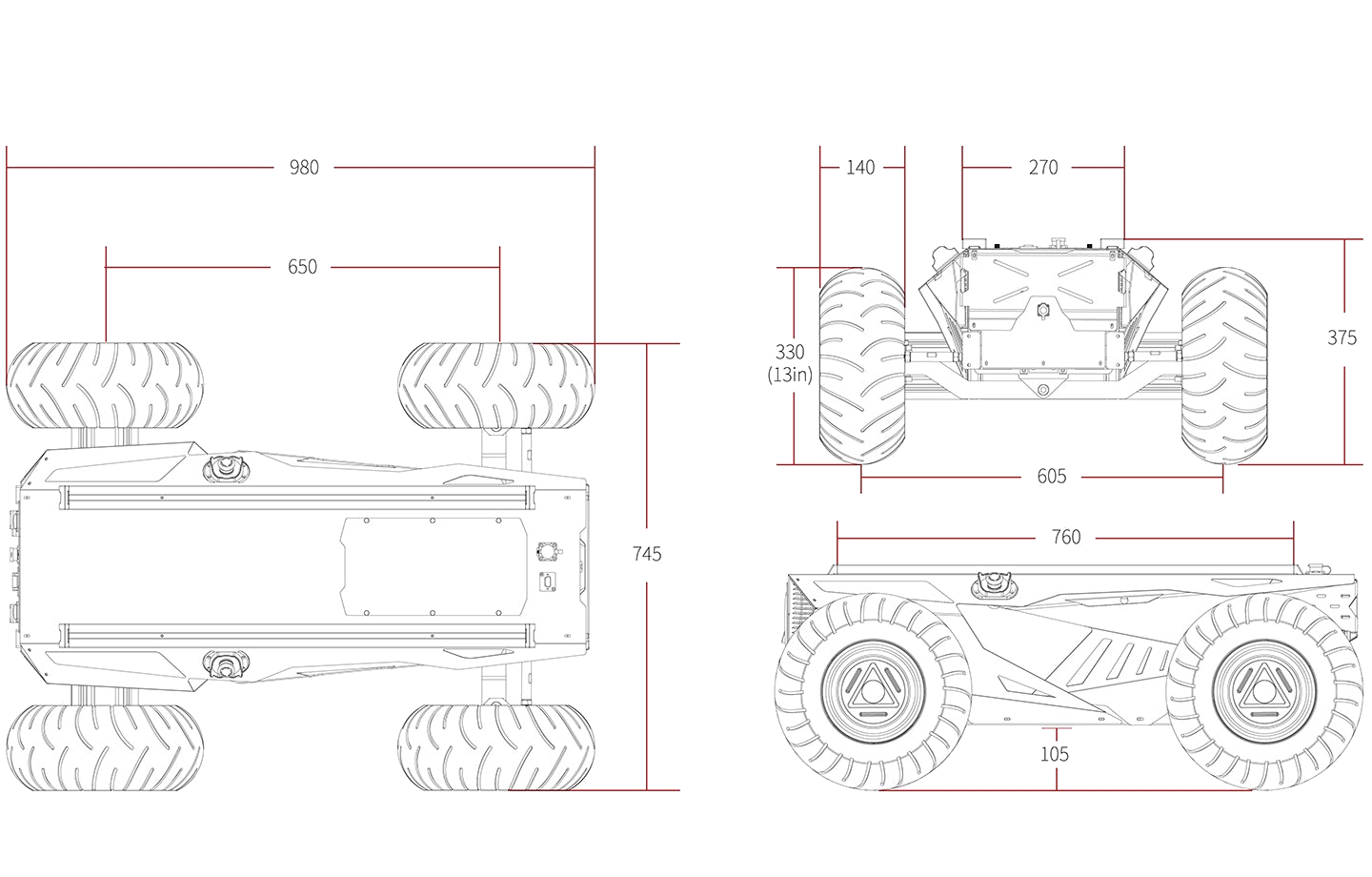
980 x 745x 380mm W x H x D |
Drive Form |
Front-wheel Ackerman Steering Rear-Wheel Drive |
| Rear-Wheel Drive | 650mm | Working Temperature | -10--45°C |
| Track | 605mm | Battery |
24V30Ah (Standard) 24V60Ah (Optional) |
| Speed and Payload |
1.5m/s, 100Payload (Standard) 2.7m/s, 80KG Payload (Optional) Customizable |
MAX Travel (without loading) |
22Km (24V30Ah Battery ) 40Km (24V60Ah Battery ) |
| Weight | 65-72KG | Charger | AC 220V Charger Output 240W |
| Minimum Turning | 1.6m | Charger Time |
3.5h (24V30Ah Battery) 7h (24V60Ah Battery) |
| Climbing Ability |
<10° With Loading |
Outward Supply |
24V15A Maximum total output current |
| Obstacle Surmounting Capacity |
5cm Single-stage Right-angle Step |
Code Disc Parameters |
2500 Lines Magnetic Incremental Encoder |
| Minimum Ground Clearance | 100mm | Motor | Drive 2x400W streeing 400W Servo Motor |
| Minimum Braking Distance |
0.2m 6km/h -> 0km/h (It depends on the ground conditions) |
Communication Interface |
Standard CAN 232 Serial Port |
| Steering Accuracy | 0.5° | Protection Level | IP22(Customizable IP54) |
| Parking Function | Electromagnetic power-off parking, maximum 10° ramp parking(For parking only) | ||
")
")
")
{kind=link}
{kind=link}
{kind=link}